近日,我校光电学院徐时清教授团队与机电学院王斌锐教授课题组合作,在基于纳米光电材料的软体机器人研究中取得新进展。该成果以“Light-driven soft actuator based on graphene and WSe2 nanosheets composite for multimodal motion and remote manipulation”为题发表在由清华大学创办的高水平国际学术期刊《Nano Research》(SCI一区)上。第一作者为光电学院2020级硕士研究生苏泽文,指导教师为白功勋研究员。
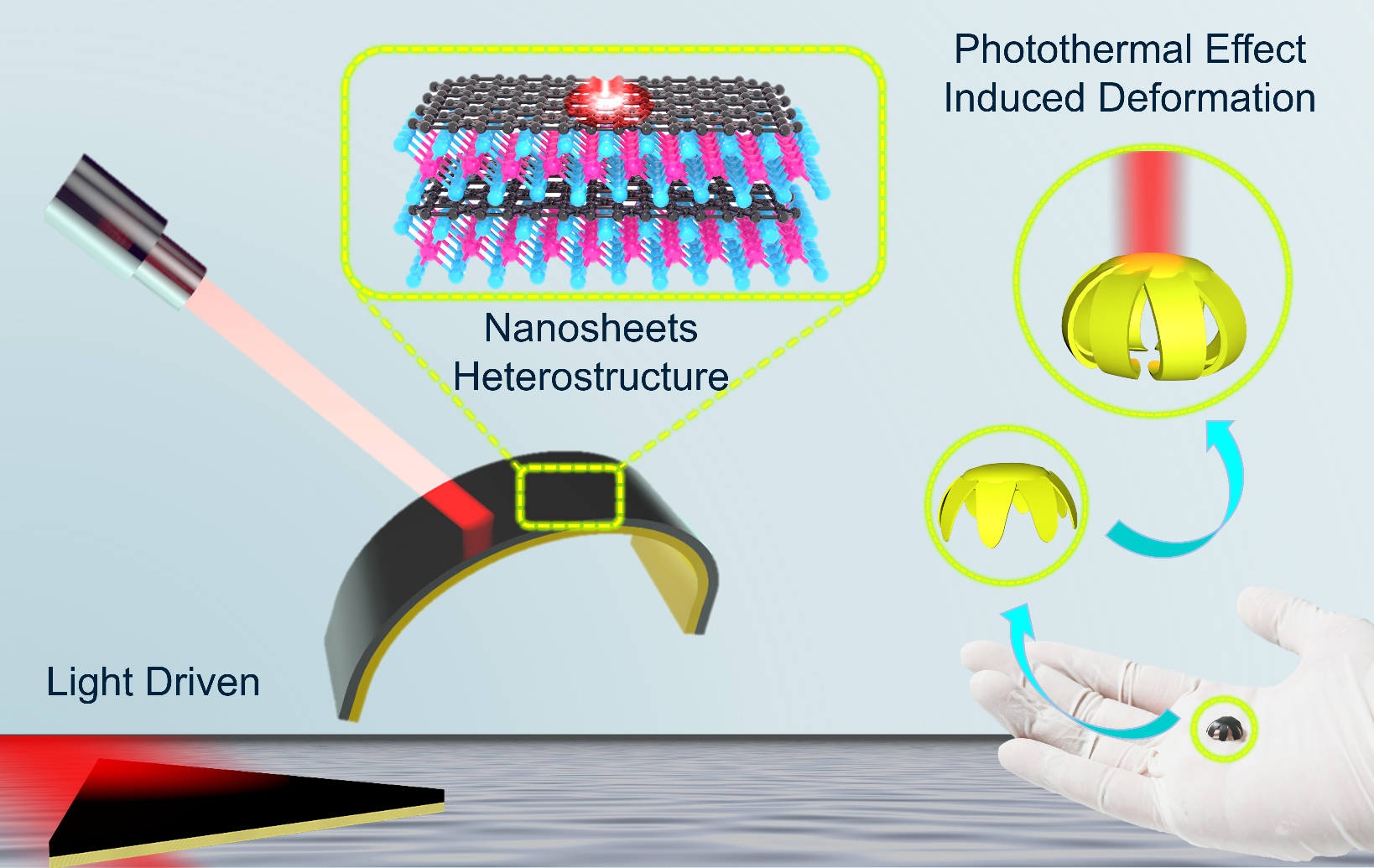
软体致动器凭借其灵活性和环境适应性在软体机器人、人造肌肉、可穿戴设备等领域中展现出了巨大的应用前景,光驱动能够打破空间限制实现远程非接触操控,因此设计能够适应多种环境的软体致动器对于实际应用具有重要意义。团队成功开发了基于纳米片异质结的近红外激光驱动软体致动器,展示了能适应不同环境、具有多种运动模式的软体机器人,以及能够实现抓取和长距离运送的柔性抓手。
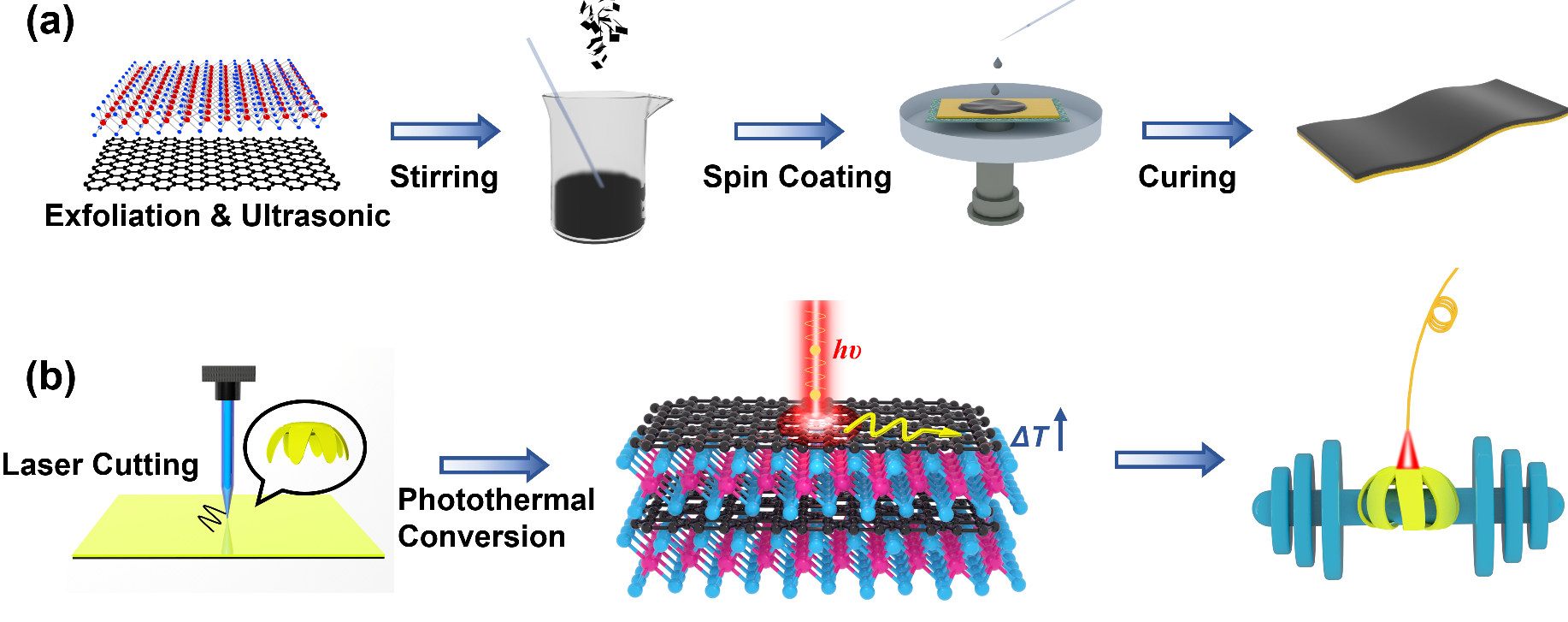
该研究通过制备二硒化钨与石墨烯的纳米片异质结,避免了石墨烯在聚二甲基硅氧烷中的团聚效应,提高了近红外范围的光吸收率与近红外激光驱动下的局域温度。团队提出了结合高能分散法、旋涂法与激光切割实现具备环境适应性的软体机器人大规模设计制造策略,对软体致动器的形变和远程操控性能进行了表征,通过实验与多物理场仿真对软体致动器的形变能力进行了表征验证。实现了近红外激光照射下软体机器人在水面上灵活高速运动。受自然界中尺蠖的运动姿态启发,团队设计出双模运动的仿生软体机器人并分析其运动过程的受力变化。作为实际应用,柔性抓手能够在近红外脉冲激光作用下抓握超过自重四倍的物体,将柔性抓手装载到导轨上能够实现抓取、提升和快速大范围运送物体,克服空间型致动器运动速度慢、设计复杂、需要持续刺激的缺陷。
该研究结果拓展了用于软体致动器的光热材料的选择范围,弥合了形状设计与可编程运动模式之间的差距,通过智能机器人设计和光纤的结合,在光热治疗和复杂环境检测等领域具有广阔的应用前景,并在工业、医疗和传感领域显示出巨大的应用潜力。
此项工作得到了国家自然科学基金面上项目(62175225)、浙江省自然科学基金重点项目(LZ21E020004)和浙江省万人计划基金(ZJWR0308004)的支持。








